UAV-based Structure from Motion for Sinkhole Characterization
UAV-based SfM
Why use SfM for mapping sinkhole characteristics?

What is SfM?
- 3D from overlapping 2D images
- Camera poses + sparse cloud → MVS dense cloud → DEM/orthomosaic

Flight & Data
- ≥75–85% overlap; nadir + oblique
- GCPs or RTK/PPK
- Consistent exposure; avoid harsh shadows

Products
- DEM/DSM, orthomosaic, point cloud, mesh
- Derivatives: slope/aspect, contours, DoD (change)

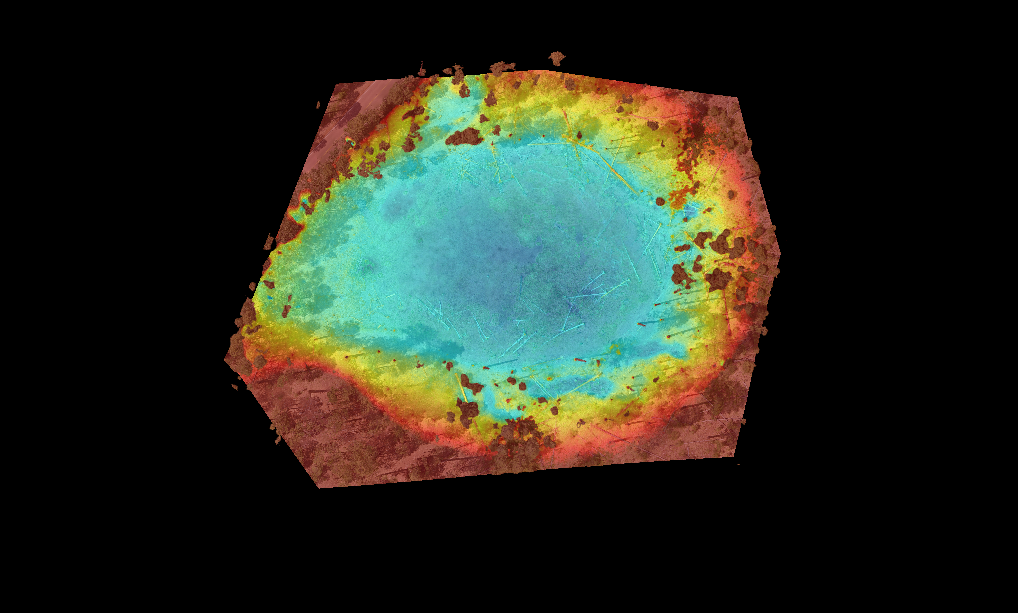
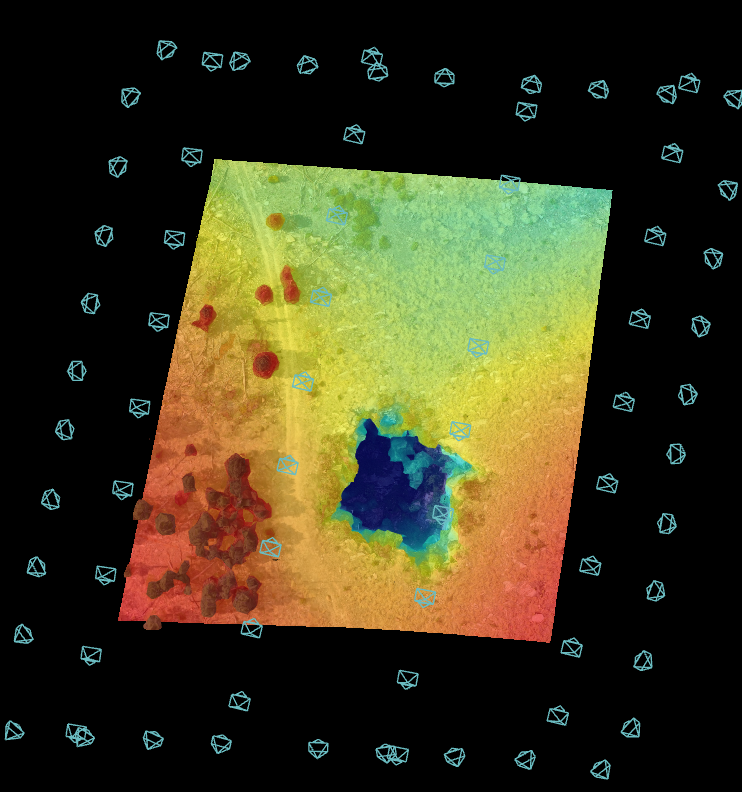
For Sinkholes
- Delineate rims/depressions
- Metrics: depth, volume (cut/fill), slope, curvature
- Integrate with lineaments & karst layers
![]()
